A selfmade Quadrocopter based on the frame Tarot Ironman 650.
Ein selbstgebauter Quadrocopter mit einem H-Frame aus Aluminium und Carbon.
Ein selbstgemachter Quadrocopter mit einem Spider-Rahmen aus Carbon und Aluminium.
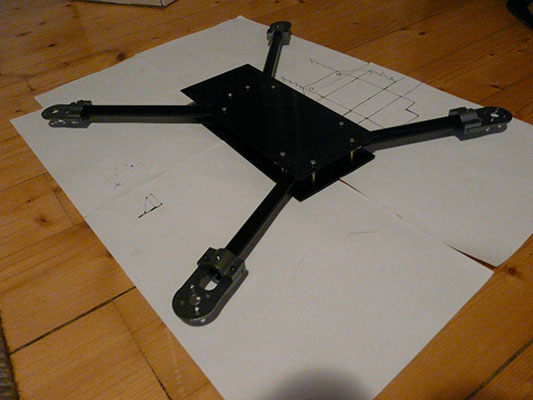
Ein selbstgemachter Quadrocopter mit einem X-Frame aus Aluminium.
Ein sehr wendiges und schnelles Boot, welches viele Aufgaben in küstennahen Gewässern erledigen kann.
Schub-Prüfstand zum messen der Leistung eines Motor - Propeller - ESC Setups.
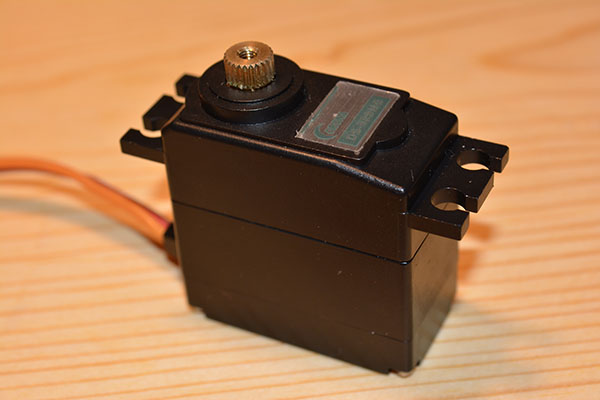
180 Grad Servo-Modifikation mit nur zwei Widerständen.
Dokumentation vom Auswechseln einer kaputten Linse einer GoPro Hero 3 Black.
I study Electrical Engineering and Information Technology at ETH Zurich.