A selfmade Quadrocopter based on the frame Tarot Ironman 650.
A selfmade Quadrocopter with an H-Frame made of aluminium and carbon.
A selfmade Quadrocopter with a Spider-Frame made of carbon and aluminium.
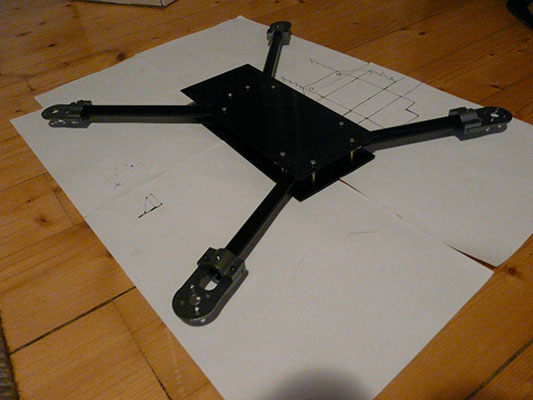
A selfmade Quadrocopter with an x-frame made of aluminium.
This is a very agile and speedy boat to fulfill lots of tasks in the costal area.
Thrust test rig to measure the power of a motor - propeller - ESC setup.
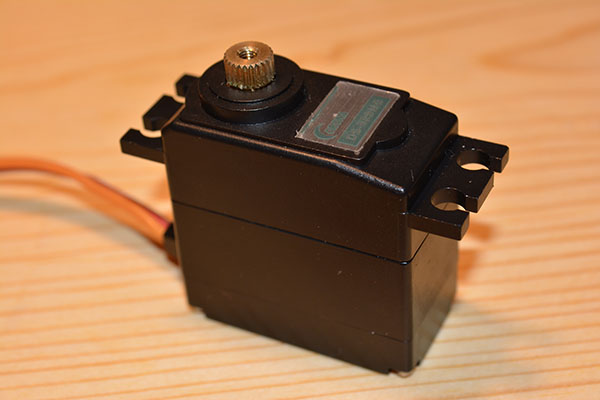
180deg servo modification with two resistors only.
Documentation of replacing a broken lens of a GoPro Hero 3 Black.
I study Electrical Engineering and Information Technology at ETH Zurich.